图同构
图同构(Graph Isomorphism)描述的是图论中,两个图之间的完全等价关系。在图论的观点下,两个同构的图被当作同一个图来研究。
目录
1 定义
2 图同构问题
2.1 计算复杂度
2.2 实用解法
3 参考文献
定义
只有节点数目相同(即同阶)的两个图才有可能同构。两个简单图G{displaystyle G}









一个具体的例子如下,为方便起见,两图中对应节点被染成了相同的颜色:
| 图G{displaystyle G} | 图H{displaystyle H} | 从图G{displaystyle G}到图H{displaystyle H}的同构映射σ{displaystyle sigma } |
|---|---|---|
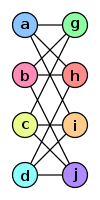 | 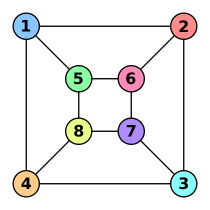 | σ(a)=1{displaystyle sigma (a)=1}  σ(b)=6{displaystyle sigma (b)=6} σ(c)=8{displaystyle sigma (c)=8} σ(d)=3{displaystyle sigma (d)=3} σ(g)=5{displaystyle sigma (g)=5} σ(h)=2{displaystyle sigma (h)=2} σ(i)=4{displaystyle sigma (i)=4} σ(j)=7{displaystyle sigma (j)=7} |







要注意的一点是,在图论中,一幅图经常可以有多种不同的方式在纸上或屏幕上画出来,所以两个看起来很不同的图也可能是同构的。尤其当图的节点数比较大时,很难一眼从画出的图上判断它们是否同构。
图同构问题
在计算机科学、数学和统计学中,图同构问题是复杂度理论研究中经常讨论的热点话题之一。图同构问题容易和图匹配问题混淆:
判定图同构(Graph Isomorphism)问题:只需判断两个图之间是否是同构的,但如果同构的话,并不要求具体找出任何做成同构的对应关系
图匹配(Graph Matching)问题:判断两个图是否同构,如果同构,找出至少一个使得两者做成同构的节点间的一一对应关系
严格地说,两个问题是不同的,显然后者是比前者更进一步的问题,但也有一些论文将两者混同并用Graph Isomorphism一词指代Graph Matching问题。迄今尚无人严格证明两者难度在P/NP意义下是相等的(要证明这一点,就必须证明第一个问题的答案可被多项式时间约化为第二个问题的答案,即:存在一个正常数d>0{displaystyle d>0}


计算复杂度
判定图同构(Graph Isomorphism)的计算复杂度是未知的,因此现在仅能被粗略地归类为NP[1];图匹配(Graph Matching)问题本身的复杂度同样是未知的,但在机器学习领域非常流行的一种约化版本将其视为NP困难的QAP问题的特殊情形
- minP∈{0,1}n×n,PTP=I‖G−PHPT‖F{displaystyle min _{Pin {0,1}^{ntimes n},P^{T}P=I}left|G-PHP^{T}right|_{F}}

其中‖⋅‖F{displaystyle |cdot |_{F}}
子图同构(Subgraph Isomorphism)问题:给定图G{displaystyle G}
子图同构已被证明是NP完全问题。
2015年,芝加哥大学教授、匈牙利裔计算机科学家László Babai宣布证明了图同构问题可以在准多项式(Quasi-polynomial)时间内求解[3]。哈洛德·贺欧夫各特指出了文中的一处错误,随后Babai宣布修正了该错误并更新了论文[4]。
对于以下的特殊情形,图同构问题是可以多项式时间甚至快速求解的:
- 树
- 平面图
- 区间生成图
- 置换生成图
- 循环对称图
- 以及当任意一个下面列举的描述图结构性特征的统计量被不随节点数增长的常数上限约束时,图同构问题可被多项式时间求解:
图的树分解的宽度
- 亏格
- 最大的节点度数 (这被认为是图同构理论迄今为止取得的最重要突破性进展之一) [5]
- 图的邻接矩阵或任何一种拉普拉斯矩阵的特征值的最大重数[6]
实用解法
与理论研究主要关注计算复杂度不同,对实用解法的研究主要关注具体应用中的实践计算速度。P/NP问题只关注时间复杂度中n{displaystyle n}
在图同构问题上,目前处于领先性能的实用解法是由澳大利亚计算机科学家Brendan McKay在1980年代提出的NAUTY[7],其对每一个图G{displaystyle G}
其它流行的方法包括:各色启发式算法[8];对QAP约化进行SDP松弛[9][10];近似计算图之间的某种不依赖于节点顺序的距离,例如图之间的编辑距离和cut distance等,这些距离的精确计算通常是NP困难的。
参考文献
^ László Babai. Groups, Graphs, Algorithms: The Graph Isomorphism Problem. ICM 2018.
^ Lyzinski, Vince, Information Recovery in Shuffled Graphs via Graph Matching, 2016, arXiv:1605.02315
^ Babai, László, Graph Isomorphism in Quasipolynomial Time, 2015, arXiv:1512.03547
^ Babai, László, Graph isomorphism update, January 9, 2017
^ Luks, Eugene M. Isomorphism of graphs of bounded valence can be tested in polynomial time. Journal of computer and system sciences. 1982, 25 (1): 42––65.
^ László Babai; D. Yu. Grigoryev; David M. Mount. Isomorphism of graphs with bounded eigenvalue multiplicity. Proceedings of the fourteenth annual ACM symposium on Theory of computing. 1982: 310––324.
^ NAUTY -- Graph Isomorphism.
^ D. Conte; P. Foggia; C. Sansone; M. Vento. Thirty Years Of Graph Matching In Pattern Recognition. International journal of pattern recognition and artificial intelligence. 2004, 18 (3): 265––298.
^ Lyzinski, Vince; Fishkind, Donniell; Fiori, Marcelo; Vogelstein, Joshua; Priebe, Carey; Sapiro, Guillermo. Graph matching: Relax at your own risk. IEEE Transactions on Pattern Analysis & Machine Intelligence. 2016.
^ Aflalo, Yonathan; Bronstein, Alexander; Kimmel, Ron. On convex relaxation of graph isomorphism. Proceedings of the National Academy of Sciences. 2015, 112 (10): 2942––2947.


